1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
|
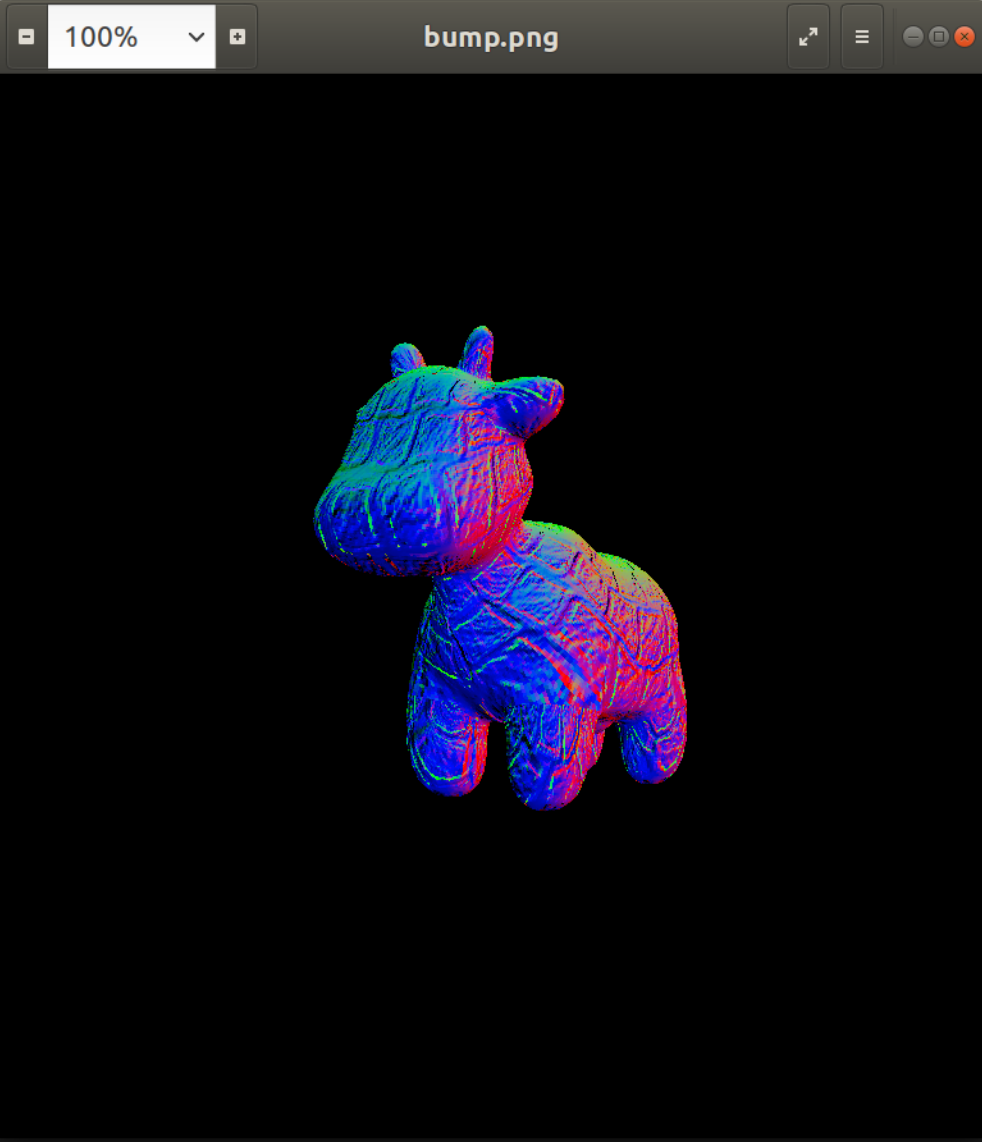
Eigen::Vector3f displacement_fragment_shader(const fragment_shader_payload& payload)
{
auto Limit_Number = [](float &number){
number = max(number, (float)0.0);
number = min(number, (float)1.0);
};
auto func_h = [&payload, Limit_Number](float u, float v) -> auto {
Limit_Number(u);
Limit_Number(v);
return payload.texture->getColor(u, v).norm();
};
Eigen::Vector3f ka = Eigen::Vector3f(0.005, 0.005, 0.005);
Eigen::Vector3f kd = payload.color;
Eigen::Vector3f ks = Eigen::Vector3f(0.7937, 0.7937, 0.7937);
auto l1 = light{{20, 20, 20}, {500, 500, 500}};
auto l2 = light{{-20, 20, 0}, {500, 500, 500}};
std::vector<light> lights = {l1, l2};
Eigen::Vector3f amb_light_intensity{10, 10, 10};
Eigen::Vector3f eye_pos{0, 0, 10};
float p = 150;
Eigen::Vector3f color = payload.color;
Eigen::Vector3f point = payload.view_pos;
Eigen::Vector3f normal = payload.normal;
float kh = 0.2, kn = 0.1;
Eigen::Vector3f n = normal;
float x = n.x(), y = n.y(), z = n.z();
Eigen::Vector3f t(x*y / sqrt(x*x + z*z), sqrt(x*x + z*z), z*y / sqrt(x*x + z*z));
Eigen::Vector3f b = n.cross(t);
Eigen::Matrix3f TBN;
TBN << t.x(), b.x(), n.x(),
t.y(), b.y(), n.y(),
t.z(), b.z(), n.z();
float u = payload.tex_coords.x(), v = payload.tex_coords.y();
float w = payload.texture->width, h = payload.texture->height;
float dU = kh * kn * (func_h(u+1/w, v) - func_h(u,v));
float dV = kh * kn * (func_h(u, v+1/h) - func_h(u,v));
Eigen::Vector3f ln(-dU, -dV, 1.0f);
ln.normalize();
normal = (TBN * ln).normalized();
point = point + kn * n * (payload.texture->getColor(u,v).norm());
Eigen::Vector3f result_color = {0, 0, 0};
Eigen::Vector3f ambient={0,0,0};
Eigen::Vector3f diffuse={0,0,0};
Eigen::Vector3f specular={0,0,0};
for (auto& light : lights)
{
float r_squared = (light.position - point).squaredNorm();
diffuse = kd.cwiseProduct(light.intensity / r_squared) * MAX(0, normal.dot(((light.position - point).normalized())));
auto h = ((light.position - point).normalized() + (eye_pos - point).normalized()).normalized();
specular = ks.cwiseProduct(light.intensity / r_squared) * std::pow(std::max(0.0f, normal.dot(h)), p);
ambient = ka.cwiseProduct(amb_light_intensity);
result_color += ambient + diffuse + specular;
}
return result_color * 255.f;
}
|