Lecture 20:Color and Perception
东西挺多的…
1 光场(Light Field / Lumigraph)
1.1 全光函数(The Plenoptic Function)
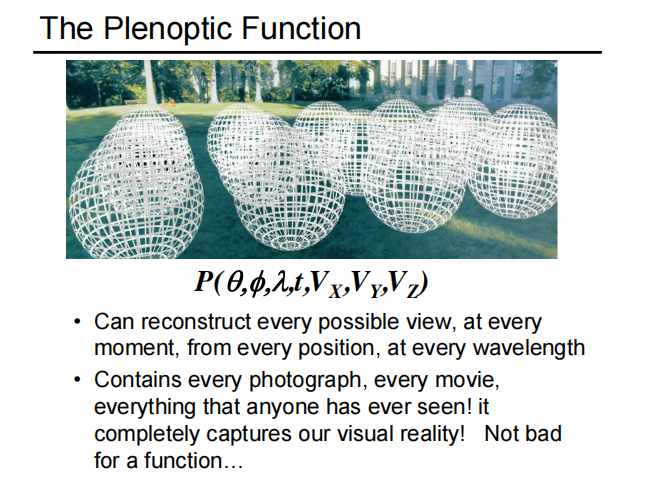
将整个世界看成是七个维度的函数:
- θ,ϕ:角度
- λ:光的波长信息(表示颜色信息)
- t:时间
- Vx,Vy,Vz:可以改变自己的位置从另外的角度看世界
P( … ) 这个函数可以表示在任何地方,任何方向,任何时间看到的东西的颜色,这个函数就是全光函数
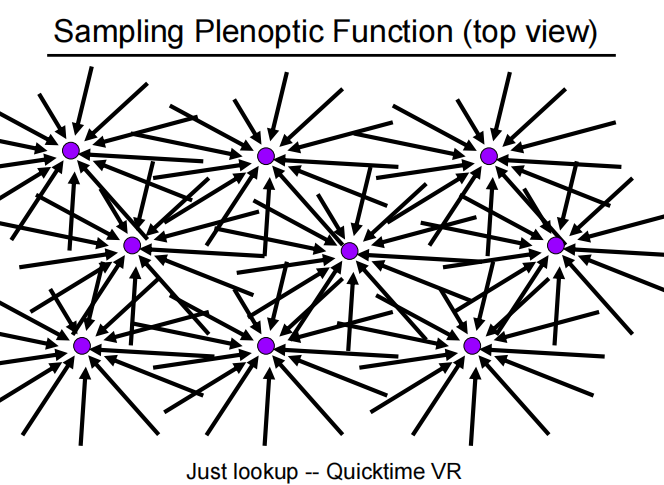
光场就是全光函数的一部分。
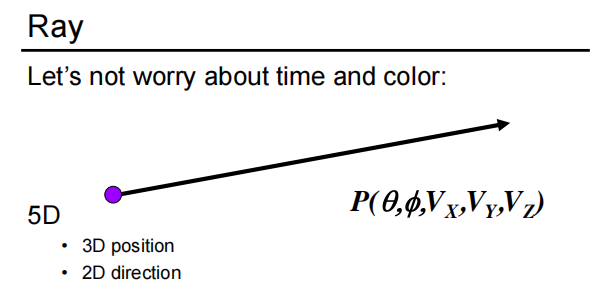
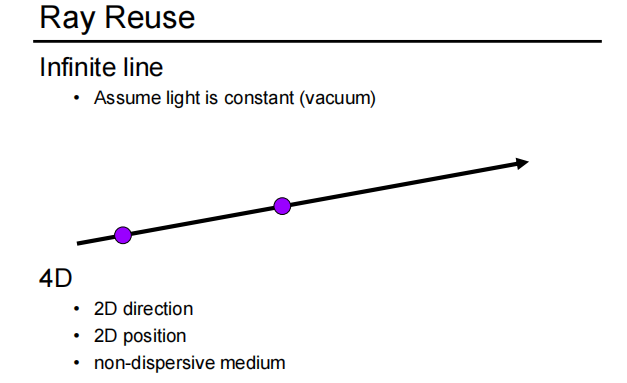
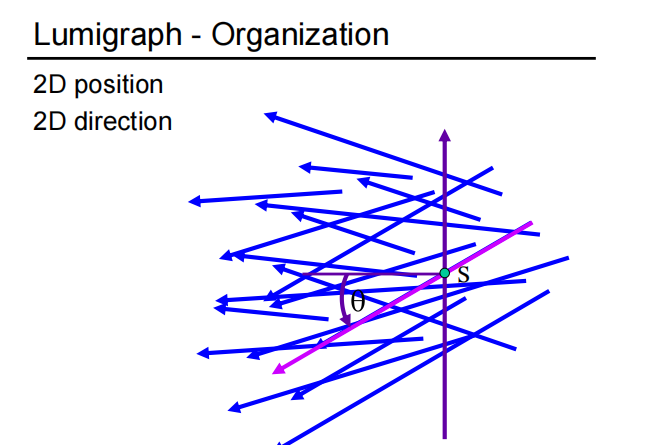
1.2 光线 Ray
光线是一个5D表示的,包含 3D 的 position 和 2D 的 direction。
另一种定义方式:两个点定义一条光线。
它是4D表示的,包含 2D 的 direction 和 2D 的 position。
1.3 光场
1.3.1 定义
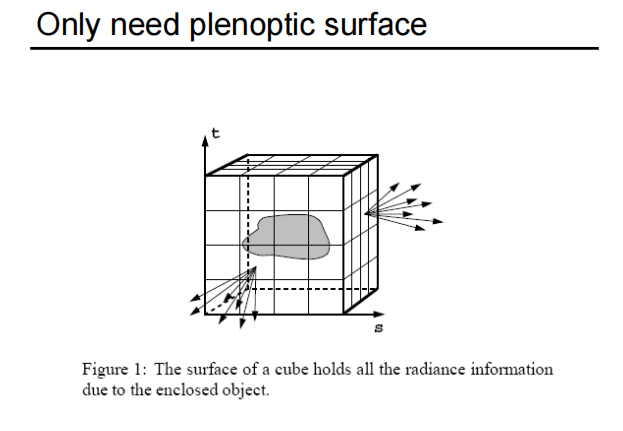
想要描述一个物体的视觉信息,只要找出它的包围盒,并记录包围盒表面任意一点向任意方向的发光情况即可。
光场就是在任何一个位置往任何一个方向去的光照强度。
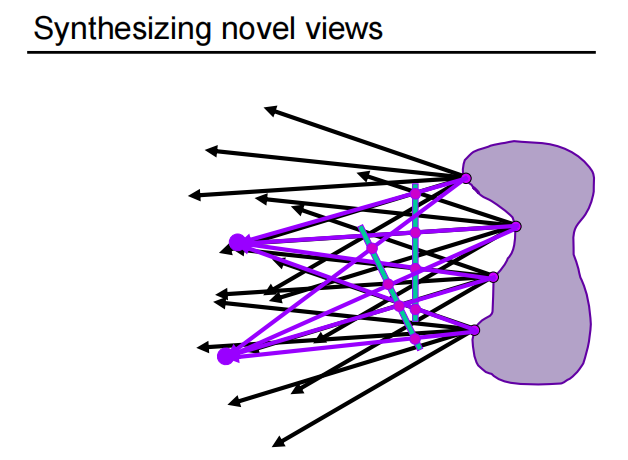
1.3.2 光场的作用
有了光场后,从任意位置都可以看向这个物体,有了视点和看向的方向,查询4D的函数就可以查询到记录的值(光的强度)。
有了包围盒之后,就可以忽略光场内部的细节,只要记录包围盒表面的任何位置任何方向的光照信息即可。
1.3.3 光场的表示方式
起始点 + 一个角度
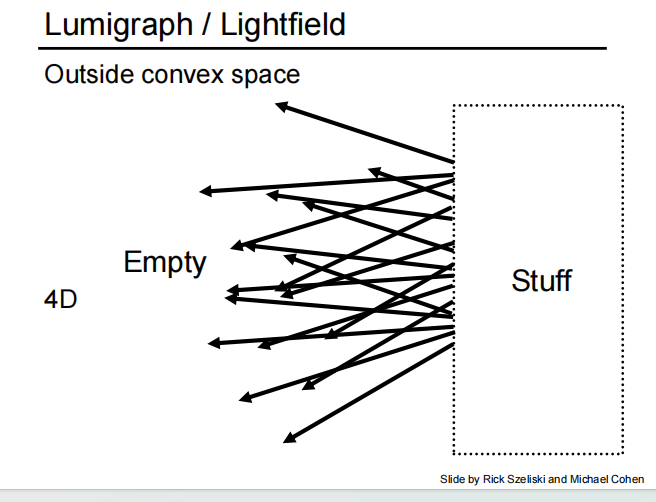
两个相互平行的平面,两个点确定一条光线
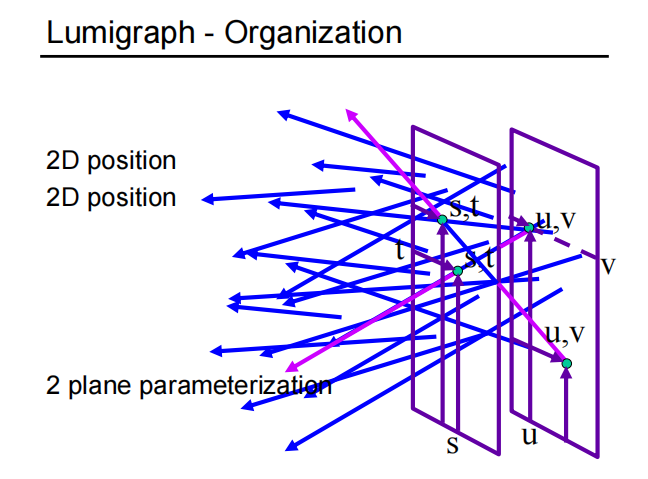
参数化的表示两个平面(s t)(u v),找到所有 uv 和 st 的对应关系,便可以定义任意一条光线。
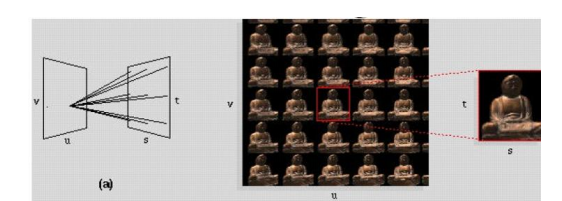
下面看一下解释,假设整个世界在 st 面的右边:
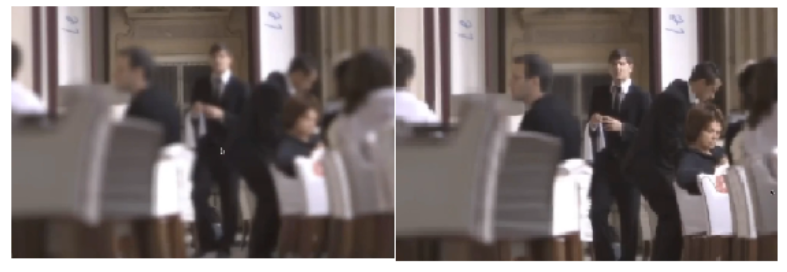
- 固定 uv 平面点x,从这个点看向 st 面的不同的点yi,然后所有yi的集合相当于就是一张图像(改变x,相当于就是从不同的角度去看这个物体)
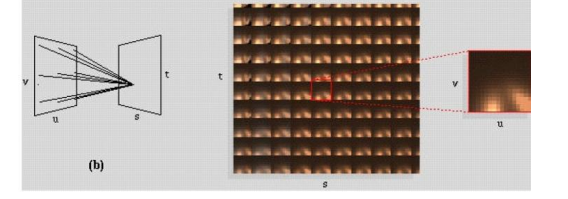
- 固定 st 平面上的点x,从 uv 面的不同的点 yi 看向x,那么所有的yi的集合就是这个物体的一个方向的结果(改变x,得到的就是这个物体的不同方向上的结果)
1.3.4 光场摄像机(Light Field Camera)
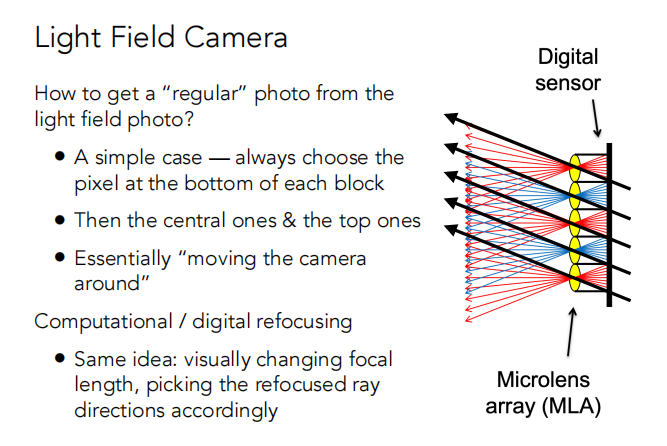
原理:本来是光都打在一个像素上的,但是现在把像素的位置往后移一下,原来的位置放成一个微透镜,让透镜把来自于不同方向的光分开然后记录下来,然后对于特定方向上的光线重新聚焦。

还原普通照片的方法:对于每个透镜都选择每一“块”的最底部的像素。
有了光场之后,可以虚拟移动相机的位置(重新聚焦也是一样的道理)。
总结:光场相机能实现虚拟移动相机位置,改变聚焦等功能。
光场相机特点:光场摄像机记录了所有的光场信息。
光场相机的问题
- 光场相机的空间上的分辨率不足。
- 高成本(胶片分辨率十分高,微透镜很精密)。
2 颜色
颜色是人的感知的结果,他不是光的自然属性。不同波长的光不是“颜色”。
2.1 颜色的物理学基础
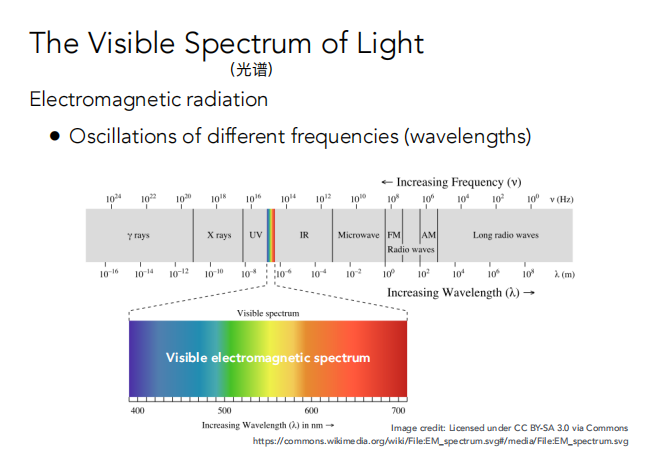
2.1.1 可见的光的波段
2.1.2 谱功率密度 Spectral Power Distribution(SPD)
SPD 是光线不同波长的光强分布是多少,如下图所示蓝天能量集中在波长低的部分,日光波长越高能量越大。
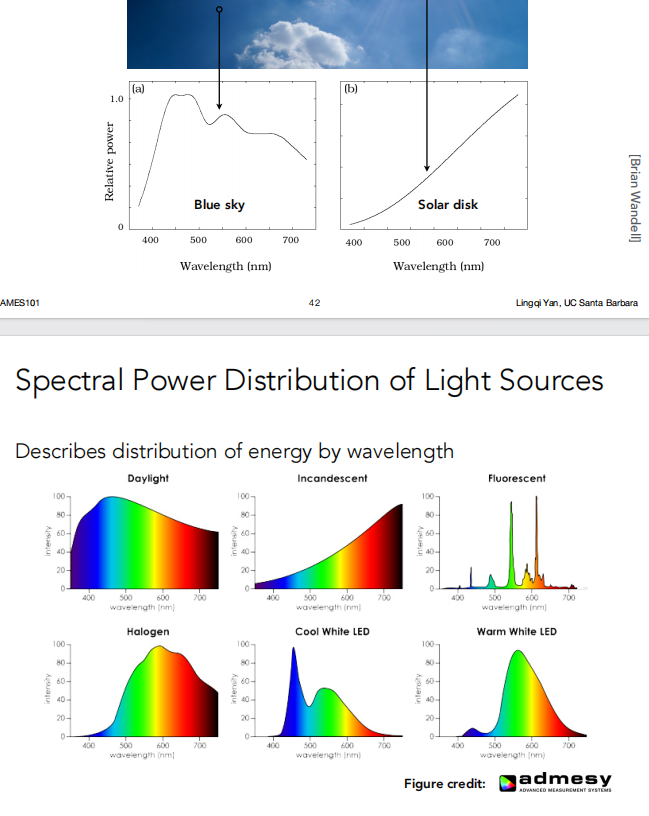
SPD 具有线性性质,即可以叠加。
2.2 颜色的生物学基础
人的眼睛是摄像机,瞳孔是光圈,晶状体是透镜(通过肌肉伸缩来控制焦距),视网膜是传感器。
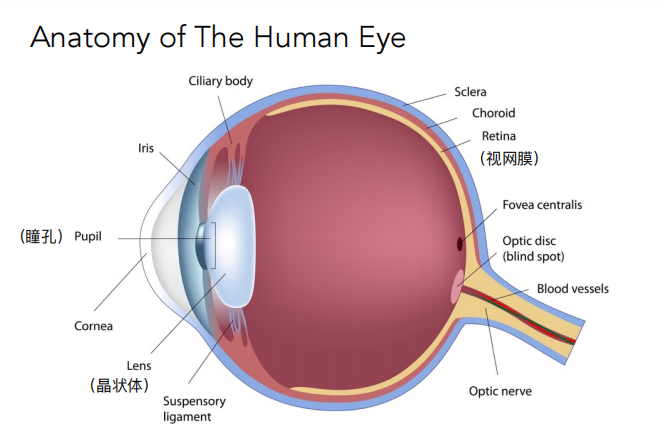
2.2.1 感光细胞:Rods and Cones
视网膜具有感光细胞(Retinel Photoreceptor Cells):棒状和锥形细胞(Rods and Cones )
Rods(棒状细胞):感知光的强度,可以得到灰度图。~120 million
Cones(锥形细胞):感知光的颜色。~6-7 million
由于三种类型的细胞对于波长的感光程度不同,Cones可以进一步划分为三类:S-Cone,M-Cone,L-Cone。
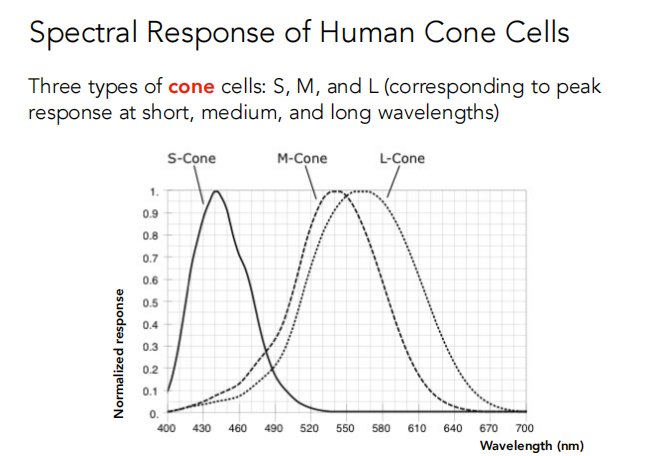
2.2.2 Tristimulus Theory of Color
以下是人类锥形细胞的相应曲线,SML是人类最终看到的结果(只是一个数,不是光谱而是积分的结果)。
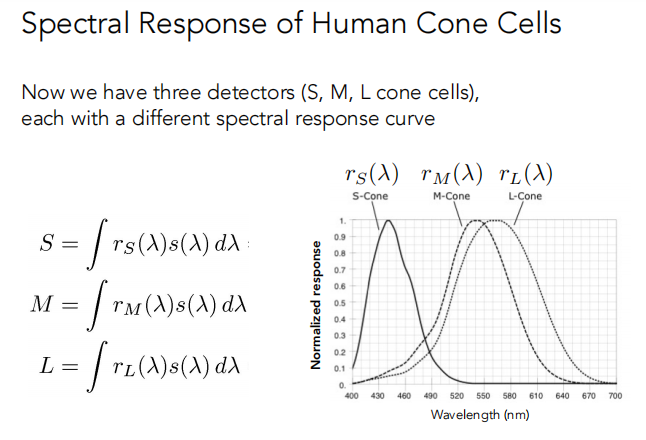
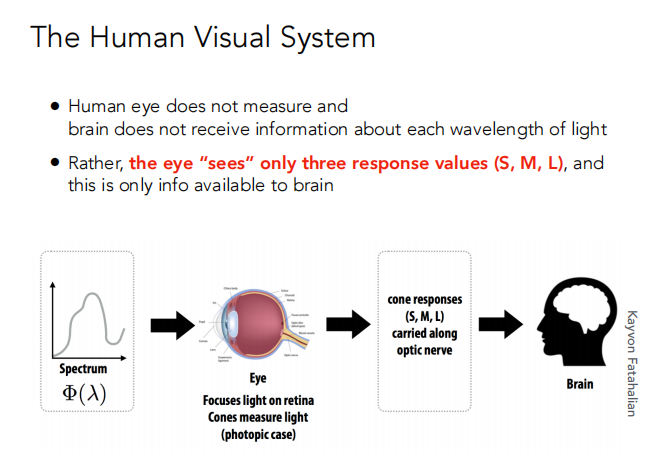
每一个光的波长信息不能被人眼测量和大脑接收。
眼睛值看到了三个 response values(S,M,L),并且是大脑唯一可获取的信息。
2.2.3 同色异谱(Metamerism)
Metamerism 是不同的光谱 spectra( ∞ − dim)会映射到相同(S,M,L)的响应。
- 这些似乎会对一个人产生相同的颜色(光谱不一定相同,但颜色可以相同)。
Metamerism 对颜色reproduction很重要。
- 不需要重构出真实世界的整个光谱。
- 例如metamer可以在显示器仅使用每个像素的三个颜色便可重现真实场景感知到的光。
2.3 颜色匹配(Color Reproduction / Matching)
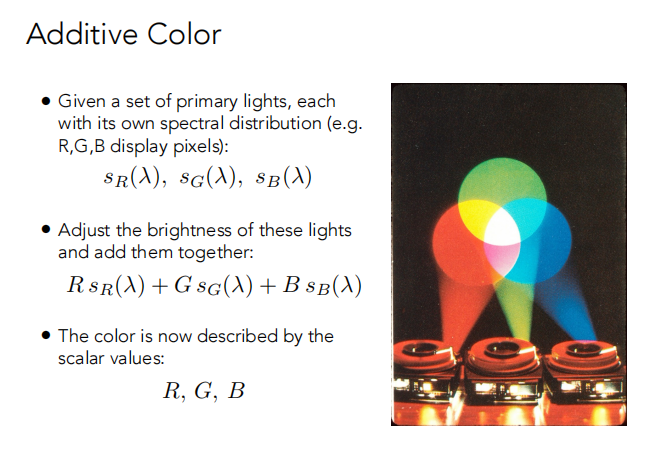
加色系统 Additive Color
- 给定一组主要的光,每个光都有自己的光谱分布(例如使用RGB显示像素)。
- 调整这些光的亮度并把它们加在一起。
- 颜色最后被标量(R,G,B)描述。
(可以进行减色)
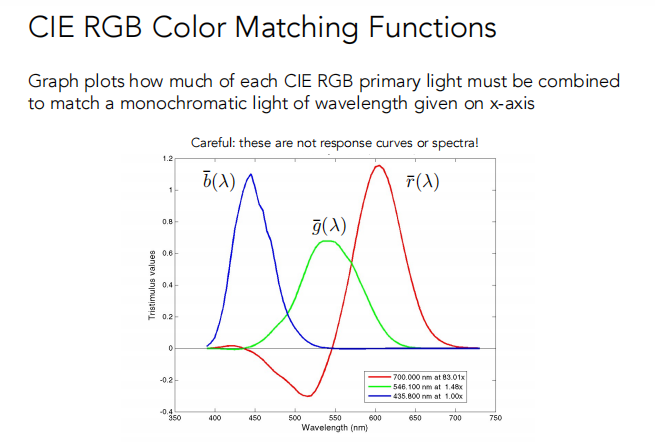
CIE RGB Color Matching
下图图显示每个CIE RGB主要(primary)光匹配x轴上给定波长的单色光需要混合的量。(注意有负的结果)。
对于任何一个光谱s,感知到的光被下面的公式匹配(缩放CIE RGB原色)。
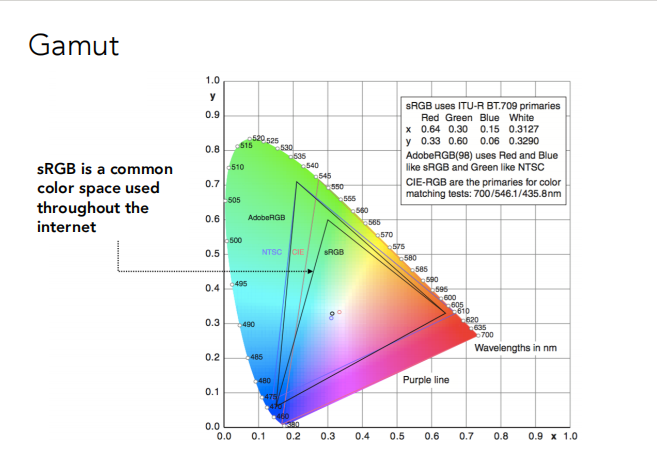
2.4 颜色空间(Color Spaces)
2.4.1 Standard Color Spaces(标准颜色空间)
- 先让特定的机器做好之后,让其他机器模仿这种RGB标准。
- 现在被广泛采用。
- 色域gamut是有限的。
2.4.2 色域(Gamut)
Gamut 是被一个原色集生成的所有色度(chromaticities)。
不同的颜色空间表示不同范围的颜色,具有不同的色域(gamut),即它们覆盖charomaticities的不同区域。
2.4.3 常见的颜色空间
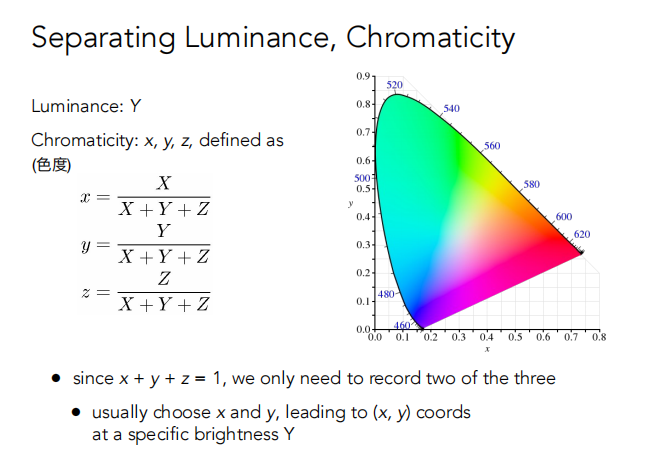
CIE是人造的颜色匹配系统。
首先设定标准颜色原色组X,Y,Z。
- 不存在具有这些匹配函数的原色。
- Y是luminace亮度(亮度与颜色无关)
这个系统设计成匹配函数严格为正,覆盖所有可见光的范围。
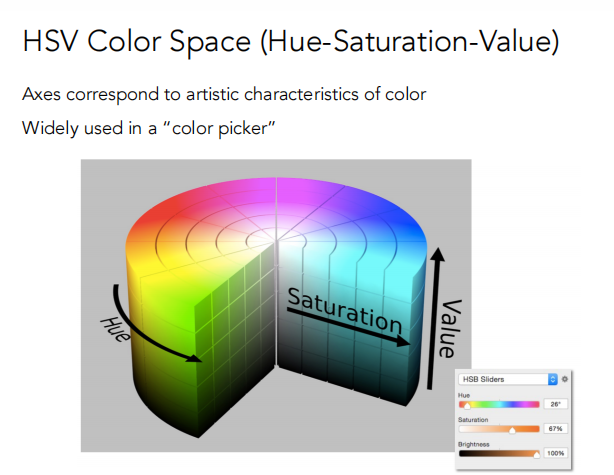
HSV 常见于颜色拾取器中(PS中常见)。
- Hue:不同类型的颜色。
- Saturation:更接近白色还是纯色(单一颜色)。
- Brightness:从黑色到某种颜色。
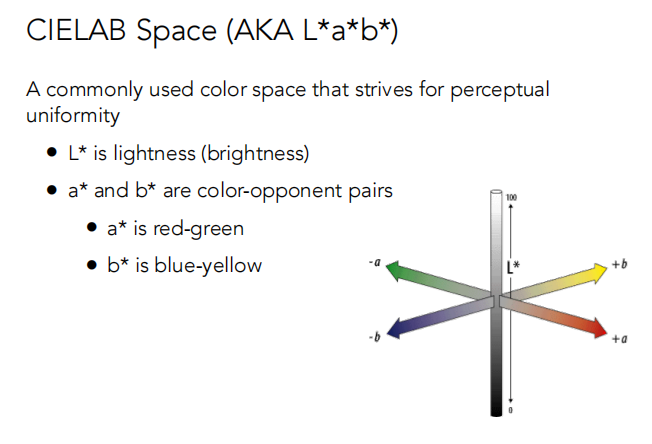
- CIELAB Space(AKA Lab*)
CIELAB Space是与感知有关的色彩空间。
- L* 是 Lightness(brightness)
- a 和 b 是互补颜色对(a是red-green,b是blue-yellow)。
- CMYK:A Subtractive(减色) Color Space
Subtractive color model:混合的越多就越暗。
青色Cyan、洋红Magenta、黄色Yellow和黑色,并(Key Widely)广泛用于打印。