HomeWork 8:质点弹簧系统
这节课比较简单,都是套公式就行;
有个点得提一下,一开始sb了,在src里面间的build文件夹,然后cmake,结果一直报错…
实际上是应该在上一级建的…(也就是 build 和 src 文件夹同一级)
知识点参考的课程:
【Games 101】Lec 21:动画
rope.cpp
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
|
Rope::Rope(Vector2D start, Vector2D end, int num_nodes, float node_mass, float k, vector<int> pinned_nodes)
{
for (int i = 0; i < num_nodes; ++i)
{
Vector2D pos = start + (end - start) * ((double)i / ((double)num_nodes - 1.0));
masses.push_back(new Mass(pos, node_mass, false));
}
for (int i = 0; i < num_nodes - 1; ++i)
{
springs.push_back(new Spring(masses[i], masses[i + 1], k));
}
for (auto &i : pinned_nodes)
{
masses[i]->pinned = true;
}
}
void Rope::simulateEuler(float delta_t, Vector2D gravity)
{
for (auto &s : springs)
{
double len = (s->m1->position - s->m2->position).norm();
s->m1->forces += -(s->k) * (s->m1->position - s->m2->position) / len * (len - s->rest_length);
s->m2->forces += -(s->k) * (s->m2->position - s->m1->position) / len * (len - s->rest_length);
}
for (auto &m : masses)
{
if (!m->pinned)
{
m->forces += gravity * m->mass;
float k_d = 0.005;
Vector2D f_d = -k_d * m->velocity;
m->forces += f_d;
Vector2D a = m->forces / m->mass;
m->velocity += a * delta_t;
m->position += m->velocity * delta_t;
}
m->forces = Vector2D(0, 0);
}
}
void Rope::simulateVerlet(float delta_t, Vector2D gravity)
{
for (auto &s : springs)
{
double len = (s->m1->position - s->m2->position).norm();
s->m1->forces += -(s->k) * (s->m1->position - s->m2->position) / len * (len - s->rest_length);
s->m2->forces += -(s->k) * (s->m2->position - s->m1->position) / len * (len - s->rest_length);
}
for (auto &m : masses)
{
if (!m->pinned)
{
m->forces += gravity * m->mass;
Vector2D a = m->forces/m->mass;
Vector2D lastPosition = m->position;
float damping_factor = 0.00005f;
m->position += (1 - damping_factor) * (m->position - m->last_position + a * delta_t * delta_t);
m->last_position = lastPosition;
}
m->forces = Vector2D(0, 0);
}
}
|
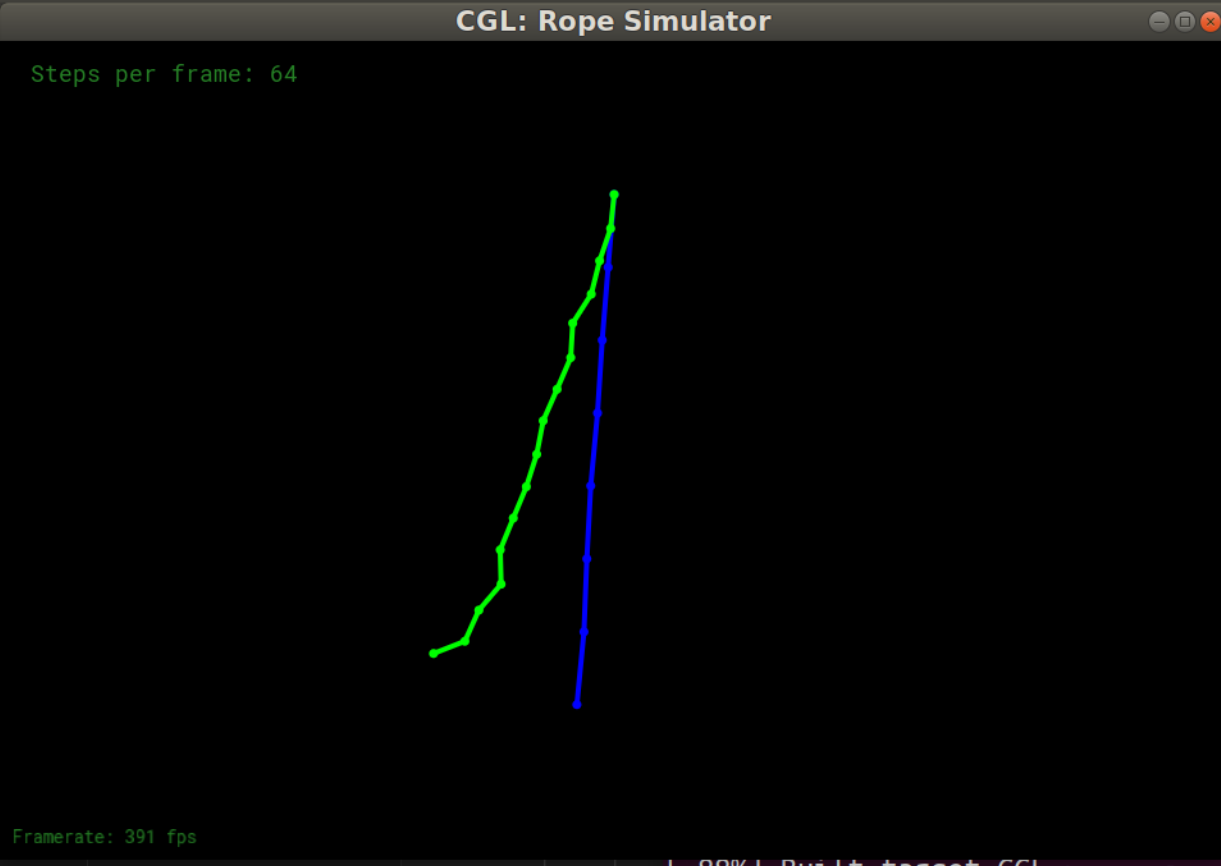
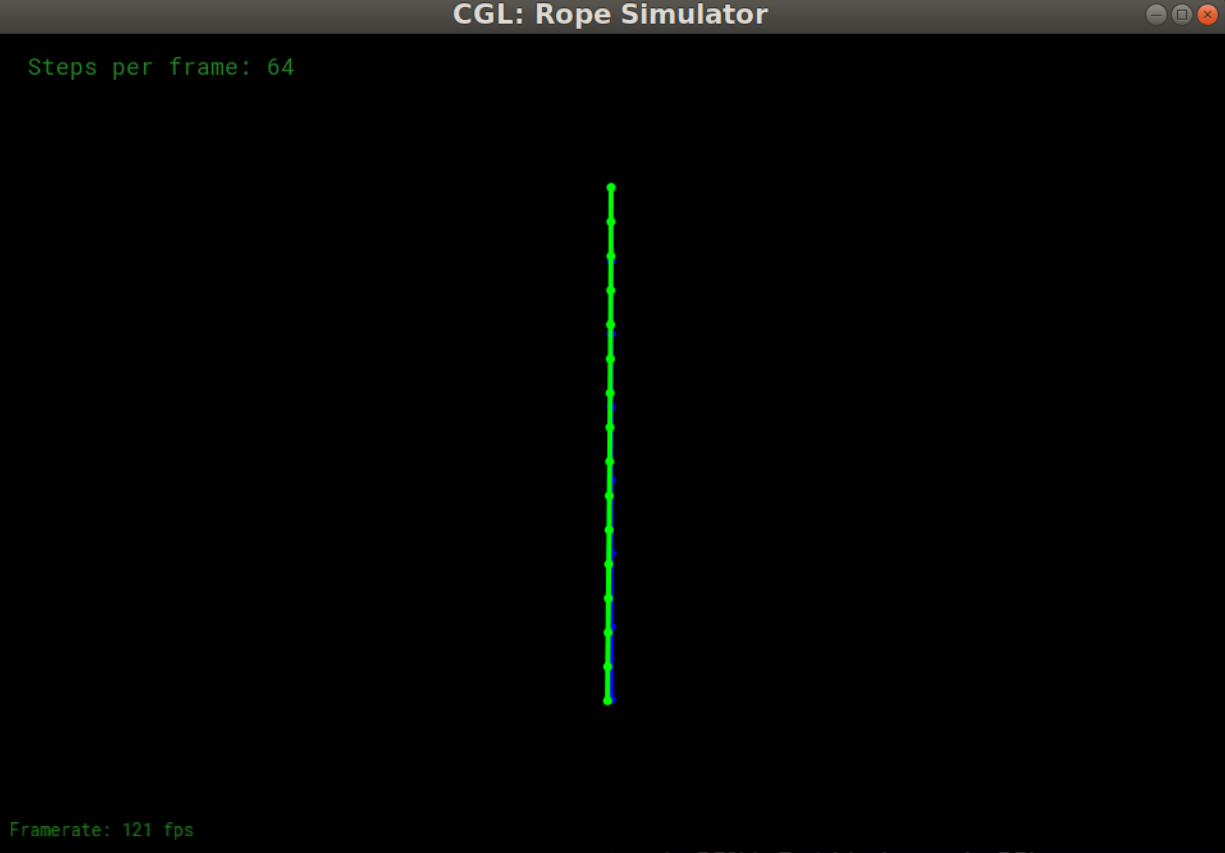
结果: